![[Diagram:Pics/linear/pqueue0-small.png]](Pics/linear/pqueue0-small.png)
Week 09
| Kruskal's Algorithm | 1/45 |
One approach to computing MST for graph G(V,E):
MSTree KruskalMST(Graph g)
{
MST = empty graph (nV(g))
sortedEdgeList = sort edges(g) by weight
foreach (edge e in sortedEdgeList) {
add e to MST
if (MST has a cyle) remove e from MST
if (MST has nV(g) vertices) break
}
return MST
}
Critical operations: sorting edges O(ElogE), checking for cycles O(EV)
Reminder: MST = subgraph, with all vertices, and minimum sum-of-edge-weights
| Prim's Algorithm | 2/45 |
Another approach to computing MST for graph G(V,E):
MSTree PrimMST(Graph g)
{
MST = empty graph (nV(g))
usedV = {0}; unusedE = edges(g)
while (size(usedV) < nV(g)) {
find (edge e in unusedE) satisfying {
e = (s,t,w), s ∈ usedV, t ∉ usedV,
w is min weight of all such edges
}
add e = (s,t,w) to MST
usedV += t; unusedE -= e
}
return MST
}
Critical operation: finding best edge
| ... Prim's Algorithm | 3/45 |
Rough time complexity analysis ...
| Priority Queues (sidetrack) |
| Priority Queues | 5/45 |
Some applications of queues require
joinleaveremovenewdisposeisEmpty
Priority order may involve "weight" based on other factors than just key
| ... Priority Queues | 6/45 |
Behaviour of priority queue ...
| ... Priority Queues | 7/45 |
Priority Queue interface:
// Types ... PQueue ...//priority queue ... Item ...//items in queue ... Key ...//priority values in items // Operations PQueue newPQueue(int Size); void PQueueJoin(PQueue q, Item it); Item PQueueLeave(PQueue q); int PQueueIsEmpty(PQueue q);
| ... Priority Queues | 8/45 |
Priority Queue representations:
| Data Structure | Space | Join | Leave | IsEmpty |
| Sorted Array | MaxN | O(N) | O(1) | O(1) |
| Unsorted Array | MaxN | O(1) | O(N) | O(1) |
| Sorted List | O(N) | O(N) | O(1) | O(1) |
| Unsorted List | O(N) | O(1) | O(N) | O(1) |
| O(N) | O(logN) | O(logN) | O(1) |
for a PQueue
| Shortest Path |
| Shortest Path | 10/45 |
Path = sequence of edges in graph G
With unweighted edges, cost(path) = length (#edges)
With weighted edges, cost(path) = sum of edge weights (aka weight(path)
Shortest path between vertices s and t
Variations: source-target, single-source, all-pairs
Applications: robot navigation, routing in data networks
| Single-source Shortest Path | 11/45 |
Given: weighted digraph G, source vertex s
Result: shortest paths from s to all other vertices
dist[]pred[]![[Diagram:Pics/wgraphs/sssp-small.png]](Pics/wgraphs/sssp-small.png)
| Edge Relaxation | 12/45 |
Assume: dist[]pred[]
(but containing data for shortest paths discovered so far)
![[Diagram:Pics/wgraphs/relaxation-small.png]](Pics/wgraphs/relaxation-small.png)
Relaxation updates data for w if we find a shorter path from s to w.
| ... Edge Relaxation | 13/45 |
Relaxation along edge e from v to w
dist[w]pred[w]
if (dist[v] + e.weight < dist[w]) {
dist[w] = dist[v] + e.weight;
pred[w] = v;
}
| Dijkstra's Algorithm | 14/45 |

(* the above algorithm is from the book "Data Structures and Algorithms in Java", 6th Edition, By: Michael T. Goodrich; Roberto Tamassia, John Wiley & Sons)
| Example-1 (Dijkstra's Algorithm) | 15/45 |
| Example-2* (Dijkstra's Algorithm) | 16/45 |
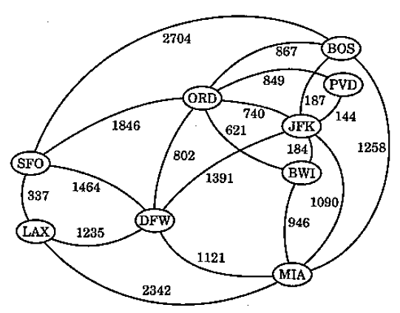
Find shortest paths (using Dijkstra's Algorithm) for the following graph, start vertex is BWI.
|
|
|||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Action | Cloud | Priority Queue | JFK | MIA | BOS | DFW | PVD | SFO | LAX | ORD | |
| { } | [ (0, BWI), (inf, JFK), (inf,ORD), (inf, MIA), (inf, DFW), (inf, BOS), (inf, PVD), (inf, SFO), (inf, LAX) ] | . | . | . | . | . | . | . | . | ||
| pull BWI into the cloud | + BWI (0) | [ (184, JFK), (621,ORD), (946, MIA), (inf, DFW), (inf, BOS), (inf, PVD), (inf, SFO), (inf, LAX) ] | BWI | BWI | . | . | . | . | . | BWI | |
| pull JFK into the cloud | + JFK (184) | [ (328, PVD), (371, BOS), (621, ORD), (946, MIA), (1575, DFW), (inf, SFO), (inf, LAX) ] | BWI | BWI | JFK | JFK | JFK | . | . | BWI | |
| pull PVD | + PVD (328) | [ (371, BOS), (621, ORD), (946, MIA), (1575, DFW), (inf, SFO), (inf, LAX) ] | BWI | BWI | JFK | JFK | JFK | . | . | BWI | |
| pull BOS | + BOS (371) | [ (621, ORD), (946, MIA), (1575, DFW), (3075, SFO), (inf, LAX) ] | BWI | BWI | JFK | JFK | JFK | BOS | . | BWI | |
| pull ORD,
update DFW and SFO |
+ ORD (621) | [ (946, MIA), (1423, DFW), (2467, SFO), (inf, LAX) ] | BWI | BWI | JFK | ORD | JFK | ORD | . | BWI | |
| pull MIA | + MIA (946) | [ (1423, DFW), (2467, SFO), (3288, LAX) ] | BWI | BWI | JFK | ORD | JFK | ORD | MIA | BWI | |
| pull DFW,
update LAX |
+ DFW (1423) | [ (2467, SFO), (2658, LAX) ] | BWI | BWI | JFK | ORD | JFK | ORD | DFW | BWI | |
| pull SFO | + SFO (2467) | [ (2658, LAX) ] | BWI | BWI | JFK | ORD | JFK | ORD | DFW | BWI | |
| pull LAX | + LAX (2658) | [ ] | BWI | BWI | JFK | ORD | JFK | ORD | DFW | BWI | |
To recover the path itself, trace back through the Predecessor table. E.g., the shortest path to LAX goes through (in reverse order) LAX, DFW, ORD, BWI.
(* the above example is from the book "Data Structures and Algorithms in Java", 6th Edition,
By: Michael T. Goodrich; Roberto Tamassia, John Wiley & Sons)
| Exercise 1: Tracing Dijkstra's Algorithm | 17/45 |
Show how Dijkstra's SSSP algorithm runs on:
![[Diagram:Pics/wgraphs/sp-example-small.png]](Pics/wgraphs/sp-example-small.png)
But maybe better to watch
Steven Ha's Visualisations (http://visualgo.net/sssp.html)
| Dijkstra's Algorithm (C implementation) | 18/45 |
What's needed for real implementation?
#define MAX_WTValue larger than any real weight #define NO_EDGEValue in adj matrix to indicate no edge // Priority Queue interface // use dist[] array to determine PQ priorities PQueue newPQ(float dist[], int nV);// add vertex to priority queue void join(PQueue, Vertex);// remove vertex with smallest dist[] Vertex leave(PQueue, Vertex);// reorder queue based on change to vertex void reorder(PQueue, Vertex);// check whether queue is empty int empty(PQueue);// clean up queue data void disposePQ(PQueue);
| ... Dijkstra's Algorithm (C implementation) | 19/45 |
C implementation (via Sedgewick)
void shortestPath(Graph g, Vertex start,
Vertex pred[], float dist[])
{
PQueue pq = newPQ(dist,nV(g));
for (Vertex v = 0; v < nV(g); v++)
{ pred[v] = -1; dist[v] = MAX_WT; join(pq,v); }
dist[start] = 0.0; reorder(pq,start);
while (!empty(pq)) {
Vertex s = leave(pq);
for (Vertex t = 0; t < nV(g); t++) {
float len = g->adj[s][t];
if (len == NO_EDGE) continue;
if (dist[s]+len < dist[t]) {
pred[t] = s;
dist[t] = dist[s]+len;
reorder(pq,t);
}
}
}
disposePQ(pq);
}
| ... Dijkstra's Algorithm (C implementation) | 20/45 |
Rough time complexity analysis ...
Outer loop has O(V) iterations, and PQ updates are O(logV).
Implementing "find (edge e=(s,t,w)) satisfying ...
| Searching |
| Searching | 22/45 |
An extremely common application in computing
struct
| ... Searching | 23/45 |
Assume that we are dealing largely with primary keys.
Search problem can be encapsulated as:
Item search(Collection c, Key k) { ... }
Possible return values:
Item
Item *search(Collection c, key k) { ... }
| ... Searching | 24/45 |
Searching is a very important/frequent operation.
Many approaches have been developed to do it ...
| Searching in Linear Structures |
| Searching in Linear Structures | 26/45 |
Linear structures: arrays, linked lists, files
Arrays = random access. Lists, files = sequential access.
Cost of searching:
| Array | List | File | |
| Unsorted | O(n) (linear scan) |
O(n) (linear scan) |
O(n) (linear scan) |
| Sorted | O(logn) (binary search) |
O(n) (linear scan) |
O(logn) (seek,seek,...) |
fseek()
| ... Searching in Linear Structures | 27/45 |
Search in unsorted array, list, file:
Item searchArray(Key k, Item a[], int n) {
int i;
for (i = 0; i < n; i++) {
if (key(a[i]) == k) return a[i];
}
return NOT_FOUND;
}
Item searchList(Key k, List L) {
List n;
for (n = L; n != NULL; n = n->next) {
if (key(n->data) == k) return n->data;
}
return NOT_FOUND;
}
Item searchFile(Key k, FILE *f) { // open at start
Item it;
while (fread(&it, sizeof(Item), 1, f) == 1) {
if (key(it) == k) return it;
}
return NOT_FOUND;
}
| Tree Data Structures |
| Trees | 29/45 |
Trees are branched data structures
![[Diagram:Pics/trees/tree-small.png]](Pics/trees/tree-small.png)
| ... Trees | 30/45 |
Trees can be viewed as a set of nested structures:
![[Diagram:Pics/trees/subtrees-small.png]](Pics/trees/subtrees-small.png)
| ... Trees | 31/45 |
For much of this course, we focus on binary trees (k=2)
Binary trees can be defined recursively, as follows:
A binary tree is either
| ... Trees | 32/45 |
Trees are used in many contexts, e.g.
![[Diagram:Pics/trees/trees-small.png]](Pics/trees/trees-small.png)
| ... Trees | 33/45 |
Search trees have the properties
| Binary Search Trees (BSTs, BSTrees) |
| Binary Search Trees | 35/45 |
Binary search trees have the characteristic properties
| ... Binary Search Trees | 36/45 |
Examples of binary search trees:
![[Diagram:Pics/trees/binary-search-trees-small.png]](Pics/trees/binary-search-trees-small.png)
Shape of tree is determined by order of insertion.
| ... Binary Search Trees | 37/45 |
Level of node = path length from root to node
Depth of tree = max path length from root to leaf
![[Diagram:Pics/trees/tree-depth-small.png]](Pics/trees/tree-depth-small.png)
Depth of tree with n nodes: min = floor(log2n), max = n-1
Height balanced tree: ∀ nodes, depth(left subtree) ≅ depth(right subtree)
Time complexity of tree algorithms is typically O(depth)
| Exercise 2: Insertion into BSTs | 38/45 |
For each of the sequences below
(b) 5 3 6 2 4 7 1
(c) 1 2 3 4 5 6 7
Assume ...
Item
| Representing BSTs | 39/45 |
Typical data structures for trees ...
// Items (and Keys) are simply integer values typedef int Item; typedef int Key;// a Tree is represented by a pointer to its root node typedef struct node *Tree;// a Node contains its data, plus left and right subtrees typedef struct node { int data; Tree left; Tree right; } Node;// some macros that we might occasionally use #define data(tree) ((tree)->data) #define left(tree) ((tree)->left) #define right(tree) ((tree)->right)
| ... Representing BSTs | 40/45 |
Abstract data vs concrete data ...
![[Diagram:Pics/trees/concrete-small.png]](Pics/trees/concrete-small.png)
| Exercise 3: BSTree Operations | 41/45 |
The files BSTree.h and BSTree.c contain an ADT for binary search trees.
Using these definitions, implement the following operations:
BSTree newBSTree()void dropBSTree(BSTree)int BSTreeFind(BSTree,int)int BSTreeDepth(BSTree)int BSTreeNodes(BSTree)BSTree BSTreeInsert(BSTree,int)Most are best expressed recursively. Base case? Recursive case?
Note: BSTreeFind()BSTreeInsert()
| Tree Traversal | 42/45 |
Iteration (traversal) on ...
SetListGraphTree
| ... Tree Traversal | 43/45 |
Consider visiting an expression tree like:
![[Diagram:Pics/trees/tree1-small.png]](Pics/trees/tree1-small.png)
NLR: + * 1 3 - * 5 7 9 (prefix-order: useful for building tree)
LNR: 1 * 3 + 5 * 7 - 9 (infix-order: "natural" order)
LRN: 1 3 * 5 7 * 9 - + (postfix-order: useful for evaluation)
Levl: + * - 1 3 * 9 5 7 (level-order: useful for ??)
| ... Tree Traversal | 44/45 |
Traversal (with parameterised visit operation):
void Traverse(Tree t, void (*visit)(Item))
{
if (t != NULL) {
// put "visit data" here for NLR
Traverse(t->left, visit);
// put "visit data" here for LNR
Traverse(t->right, visit);
// put "visit data" here for LRN
}
}
Level-order cannot be implemented recursively.
| Exercise 4: Generic Traversal | 45/45 |
Implement a generic tree traversal function
void BSTreeTraverse(BSTree t,
void (*visit)(),
char *order)
where
orderorderProduced: 13 Sep 2017