Consider the following OpenGL code:
gl.glMatrixMode(GL2.GL_MODELVIEW);
// #1
// Matrix is unknown - whatever value the last piece of OpenGL code set it to.
gl.glLoadIdentity();
// #2
// Matrix is the identity:
// [ 1 0 0 ]
// [ 0 1 0 ]
// [ 0 0 1 ]
// Coordinate frame is the world frame
gl.glRotated(30, 0, 0, 1);
// #3
// [ 1 0 0 ] [ cos(30) -sin(30) 0 ] [ 0.87 -0.5 0 ]
// [ 0 1 0 ] [ sin(30) cos(30) 0 ] = [ 0.5 0.87 0 ]
// [ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ]
//
// The origin is (0,0)
// i = (0.87, 0.5)
// j = (-0.5, 0.87)
gl.glScaled(-2, 2, 1);
// #4
// [ 0.87 -0.5 0 ] [ -2 0 0 ] [ -1.73 -1 0 ]
// [ 0.5 0.87 0 ] [ 0 2 0 ] = [ -1 1.73 0 ]
// [ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ]
//
// the origin is still (0,0)
// i = (-1.73, -1)
// j = (-1, 1.73)
gl.glTranslated(1, 0, 0);
// #5
// [ -1.73 -1 0 ] [ 1 0 1 ] [ -1.73 -1 -1.73 ]
// [ -1 1.73 0 ] [ 0 1 0 ] = [ -1 1.73 -1 ]
// [ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ]
//
// the origin is now (-1.73, -1)
// i and j are not changed
// i = (-1.73, -1)
// j = (-1, 1.73)
gl.glBegin(GL2.GL_POLYGON);
{
gl.glVertex2d(1, 1);
// [ -1.73 -1 -1.73 ] [ 1 ] [ -4.46 ]
// [ -1 1.73 -1 ] [ 1 ] = [ -0.27 ]
// [ 0 0 1 ] [ 1 ] [ 1 ]
gl.glVertex2d(1, 2);
// [ -1.73 -1 -1.73 ] [ 1 ] [ -5.46 ]
// [ -1 1.73 -1 ] [ 2 ] = [ 1.46 ]
// [ 0 0 1 ] [ 1 ] [ 1 ]
gl.glVertex2d(2, 1.5);
// [ -1.73 -1 -1.73 ] [ 2 ] [ -6.69 ]
// [ -1 1.73 -1 ] [ 1.5 ] = [ -0.41 ]
// [ 0 0 1 ] [ 1 ] [ 1 ]
}
gl.glEnd();
Question 2:Ā
Consider the 2D tranformation matrix:
[ 1 -1 1 ] [ 1 2 2 ] [ 0 0 1 ]
Yes, the bottom row is 0, 0, 1, so it is an affine matrix.
Origin = (1,2) i = (1,1) <- pointing up and right j = (-1,2) <- point up and left
|i| = sqrt(2) |j| = sqrt(5)
angle_i = atan(1 / 1) = 45 degrees angle_j = atan(2 / -1) = 117 degrees
Yes, the axes are not perpendicular.
Question 3:
Consider the scene graph below:

Note: If this is taking too long and people are already comfortable with matrix multiplication feel free to use matrix multiplier or similar. In an exam you would have to do by hand/normal calculator but you have already done enough matrix mult in question 1 for one tutorial.
Root:
=====
[ 1 0 0 ]
[ 0 1 0 ]
[ 0 0 1 ]
Object 1:
=========
M_1 = M_root T_1 R_1 S_1
[ 1 0 0 ] [ 1 0 1 ] [ 0 -1 0 ] [ 1 0 0 ]
= [ 0 1 0 ] [ 0 1 0 ] [ 1 0 0 ] [ 0 1 0 ]
[ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ]
[ 0 -1 1 ]
= [ 1 0 0 ]
[ 0 0 1 ]
Origin_1 = (1,0)
i_1 = (0,1)
j_1 = (-1,0)
Object 2:
=========
M_2 = M_root T_2 R_2 S_2
[ 1 0 0 ] [ 1 0 -1 ] [ cos(-45) -sin(-45) 0 ] [ 2 0 0 ]
= [ 0 1 0 ] [ 0 1 -1 ] [ sin(-45) cos(-45) 0 ] [ 0 2 0 ]
[ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ]
[ 1.41 1.41 -1 ]
= [ -1.41 1.41 -1 ]
[ 0 0 1 ]
Origin_2 = (-1, -1)
i_2 = (1.41, -1.41)
j_2 = (1.41, 1.41)
Object 3:
=========
M_3 = M_1 T_3 R_3 S_3
[ 0 -1 1 ] [ 1 0 1 ] [ cos(60) -sin(60) 0 ] [ 4 0 0 ]
= [ 1 0 0 ] [ 0 1 0 ] [ sin(60) cos(60) 0 ] [ 0 4 0 ]
[ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ]
[ -3.464 -2.000 1.000 ]
= [ 2.000 -3.464 1.000 ]
[ 0.000 0.000 1.000 ]
Origin_3 = (1,1)
i_3 = (-3.464, 2)
j_3 = (-2, -3.464)
Object 3:
=========
Now:
M_3 = M_2 T_3 R_3 S_3
[ 1.41 1.41 -1 ] [ 1 0 1 ] [ cos(60) -sin(60) 0 ] [ 4 0 0 ]
= [ -1.41 1.41 -1 ] [ 0 1 0 ] [ sin(60) cos(60) 0 ] [ 0 4 0 ]
[ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ]
// More math. Bleh.
[ 7.704 -2.064 1.820 ]
= [ 2.064 7.704 -1.000 ]
[ 0 0 1 ]
Origin_3 = (1.82, -1) <-- origin has moved
i_3 = (-7.7, 2.06) <-- axes are stretch and rotated
j_3 = (-2.06, 7.7)
Before
======
global_origin_3 = M_1 * local_origin_3 = (1,1), as above
global_angle_3 = local_angle_3 + local_angle_1 + local_angle_root = 150 degrees
global_scale_3 = local_scale_3 * local_scale_1 * local_scale_root = 4
After
=====
We want to preserve these values so:
global_origin_3 = M_2 * local_origin_3
= M_root * T_2 * R_2 * S_2 * local_origin_3
local_origin_3 = M_2 ^ -1 * global_origin_3
= S_2 ^ -1 * R_2 ^ -1 * T_2 ^ -1 * M_Root^-1 * (1,1)
[ 0.5 0 0 ] [ cos(45) -sin(45) 0 ] [ 1 0 1 ] [ 1 0 0 ] [ 1 ]
= [ 0 0.5 0 ] [ sin(45) cos(45) 0 ] [ 0 1 1 ] [ 0 1 0 ] [ 1 ]
[ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ] [ 0 0 1 ] [ 1 ]
[ 0.354 -0.354 0.000 ] [ 1 ]
= [ 0.354 0.354 0.708 ] [ 1 ]
[ 0 0 1 ] [ 1 ]
[ 0.000 ]
= [ 1.416 ]
= [ 1.000 ]
So the new local origin is (0.000, 1.416)
global_angle_3 = local_angle_3 + local_angle_2 + local_angle_root
150 = local_angle_3 - 45
local_angle_3 = 195
global_scale_3 = local_scale_3 * local_scale_2 * local_scale_root
4 = local_scale_3 * 2
local_scale_3 = 2
Camera:
=========
M_C = M_2 T_C R_C S_C
[ 1.41 1.41 -1 ] [1 0 0 ] [1 0 0 ] [ 2 0 0 ]
= [ -1.41 1.41 -1 ] [0 1 0 ] [0 1 0 ] [ 0 2 0 ]
[ 0 0 1 ] [0 0 1 ] [0 0 1 ] [ 0 0 1 ]
= [ 2.82 2.82 -1 ]
[ -2.82 2.82 -1 ]
[ 0.0 0.0 1 ]
Origin_C = (-1, -1)
i_2 = (2.82, -2.82)
j_2 = (2.82, 2.82)
global_angle_C = local_angle_C + local_angle_2 + local_angle_root = 0 -45 + 0 = -45
global_scale_C = local_scale_C * local_scale_2 * local_scale_root = 2 * 2 * 1 = 4
Therefore we would create a matrix with inverse global
scale multiplied by inverse global rotation multiplied
by the inverse global origin.
VIEW MATRIX: = INVERSE_CAMERA_GLOBAL_SCALE *
INVERSE_CAMERA_GLOBAL_ROTATION *
INVERSE_CAMERA_GLOBAL_TRANSLATION
[0.25 0 0] [ 0.7 -0.7 0 ] [ 1 0 1 ]
[0 0.25 0] [ 0.7 0.7 0 ] [ 0 1 1 ]
[0 0 1] [ 0 0 1 ] [ 0 0 1 ]
= [ 0.175 -0.175 0 ]
[ 0.175 0.175 0.35 ]
[ 0 0 1 ]
Question 4:
Sketch the lines described by these equations:
Where do they intersect?
If Line 1 is a ray starting at A and line 2 is an edge of a polygon
(with n pointing outwards), is the ray entering or exiting the polygon?
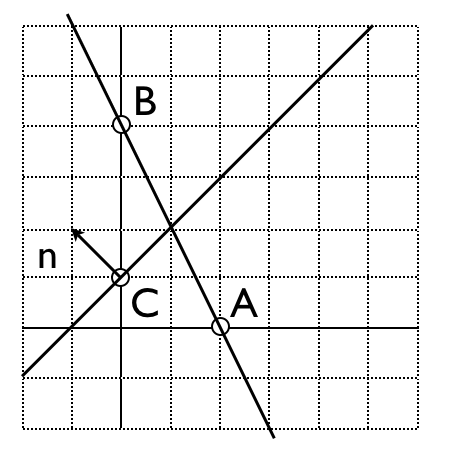
To compute intersection:
n . (C - L(t)) = 0
[ -1 ] . ( [ 0 ] - [ 2 ] - [ 0 - 2 ] t ) = 0
[ 1 ] ( [ 1 ] [ 0 ] [ 4 - 0 ] )
[ -1 ] . [ -2 + 2t ] = 0
[ 1 ] [ 1 - 4t ]
-1 * (-2 + 2t) + 1 * (1-4t) = 0
2 - 2t + 1 - 4t = 0
3 - 6t = 0
t = 1/2
L(1/2) = A + (B-A) * 0.5
= [ 1 ]
[ 2 ]
The ray is emerging from the polygon as:
v = (B-A) = (-2, 4)
n.v = (-1, 1) . (-2, 4)
= 2 + 4
> 0
Question 5:
Given the clipping rectangle with bottom-left cornerĀ(1,1) and top-right corner (4,5), apply the Cohen-Sutherland algorithm to clip the following lines:

Compute endpoint codes in the order (Top, Bottom, Left, Right) with outside = 1, inside = 0
A = (0,2), B=(4,0)
End(A) = (0,0,1,0)
End(B) = (0,1,0,0)
There is no bit in common, so we need to clip.
Clip A with left -> A = (1, 1.5)
End(A) = (0,0,0,0)
End(B) = (0,1,0,0)
We need to clip again.
Clip B with bottom -> B = (2,1)
End(A) = (0,0,0,0)
End(B) = (0,0,0,0)
This is now a trivial accept.
A = (3,4), B=(2,2)
End(A) = (0,0,0,0)
End(B) = (0,0,0,0)
Both are zero ->Trivial accept. No clipping needs to be done.
A = (0,6), B=(5,6)
End(A) = (1,0,1,0)
End(B) = (1,0,0,1)
The top bit is 1 in both -> Trivial reject
A = (3,0), B=(5,2)
End(A) = (0,1,0,0)
End(B) = (0,0,0,1)
No bit in common -> we need to clip.
Clip A to bottom -> A = (4, 1)
End(A) = (0,0,0,0)
End(B) = (0,0,0,1)
No bit in common -> we need to clip
Clip B to right hand side -> B = (4,1)
End(A) = (0,0,0,0)
End(B) = (0,0,0,0)
Repeat the process using the Cyrus-Beck algorithm instead.
A = (0,2), B=(4,0)
(B-A) = (4, -2)
tmin = 0
tmax = 1
1) Intersect with left edge, P = (1,3), n = (-1, 0)
t = n . (P-A) / n . (B-A)
= 0.25
n . (B-A) = (-1, 0) . (4, -2)
= -4
< 0 so the ray it entering
tmin = max(0, 0.25) = 0.25
tmax = 1
2) Intersect with top edge, P = (2,5), n = (0,1)
t = -1.5
n . (B-A) = -2 < 0 so the ray is entering
tmin = max(0.25, -1.5) = 0.25
tmax = 1
3) Intersect with right edge, P = (4,3), n = (1,0)
t = 1
n . (B-A) = 4 > 0 so the ray is exiting
tmin = 0.25
tmax = min(1,1) = 1
4) Intersect with bottom edge, P = (2, 1), n = (0, -1)
t = 0.5
n . (B-A) = 2 > 0 so the ray is exiting
tmin = 0.25
tmax = min(1, 0.5) = 0.5
Done. Edge is clipped to:
L(0.25) = (1, 1.5)
L(0.5) = (2, 1)
The rest are left as an exercise to the reader.
A = (3,4), B=(2,2)
A = (0,6), B=(5,6)
A = (3,0), B=(5,2)